V lednu tak uplyne již deset let od zahájení průzkumu Marsu pomocí dvou robotických vozítek v rámci programu MER (Mars Exploration Rover). Počátky průzkumu robotnickými vozítky však začaly již dříve, vysláním malého vozítka Soujorner na konci minulého tisíciletí v rámci mise Mars Pathfinder (Průkopník). Mise odstartovala 4. 12. 1996 ze základny Cape Canaveral pomocí rakety Delta II, a na povrchu Marsu přistála po 7 měsících letu, 4. 7. 1997. Mise, původně plánovaná asi na týden, byla nakonec ukončena až po 3 měsících (definitivně ukončena až v březnu 1998) po odmlčení mateřské sondy. Úspěšný průběh vytvořil podmínky pro přípravu a uskutečnění další průzkumné mise na rudou planetu.
V roce 2003 byla zahájena další etapa výzkumu, v níž hrály hlavní roli dva zcela identické rovery. Dne 10. 6. 2003 odstartovala ze základny na Cape Canaveral první část mise s označením MER A, v níž bylo vozítko Spirit. O necelý měsíc později, dne 8. 7. 2003, ze stejné základny odstartovala i druhá část mise s označením MER B, v níž bylo druhé z vozítek, nazvané Opportunity. Obě vozítka vynesly rakety typu Delta II. Po několika měsících letu se v lednu 2004 uskutečnila obě přistání. Nejprve dosedl Spirit 4. 1. 2004 v oblasti kráteru Gusev. Druhé vozítko Opportunity přistálo 25. 1. 2004, tentokrát v oblasti plošinyMeridiani.
Přistávací manévr obou misí MER byl zajímavý a podobný manévru uskutečněnému během předchozí mise sondy Mars Pathfinder. Přistávací modul s roverem nejprve vstoupil do atmosféry Marsu, a to přímo z příletové dráhy, tedy vysokou rychlostí. Počáteční část brzdného manévru zprvu zajišťoval tepelný štít. Jakmile došlo k poklesu sestupové rychlosti, byl tepelný štít odhozen. Další fáze brzdění závisela na hlavním padáku. Po přiblížení k povrchu došlo k nafouknutí airbagů, které měly za úkol utlumit vlastní dopad v závěrečné fázi letu. Ve výšce několika desítek metrů nad povrchem planety se spustil brzdící motor na TPH a zároveň došlo k oddělení hlavního padáku. Pouzdro s roverem chráněné pouze nafouknutým airbagem dopadlo na povrch volným pádem. Po několika odskocích se zastavilo a došlo k vyfouknutí airbagů. Přistávací pouzdra byla vybavena pouze nezbytnými přístroji pro řízení přistání a dále pro otevření bočních stěn. Bylo zajištěno i správné polohování, tedy aby se pouzdro vždy překlopilo do správné polohy tak, aby rover mohl po otevření bočních stěn plošinu pouzdra opustit po kolejničkách a zahájit tak svou misi.
Napájení zabezpečují rozkládací solární panely umístěné v horní části vozítka. Jejich výkon dosahuje až 140 W. Panely zajišťují energii pro pohonnou jednotku a elektronickou aparaturu. Kromě toho jsou vozítka vybavena dvojici lithium-iontových akumulátorů, každý o hmotnosti 7,2 kg. Přídavné baterie zajišťují el. energii v průběhu noci a pokud se vozítko dostane do zastíněné oblasti.
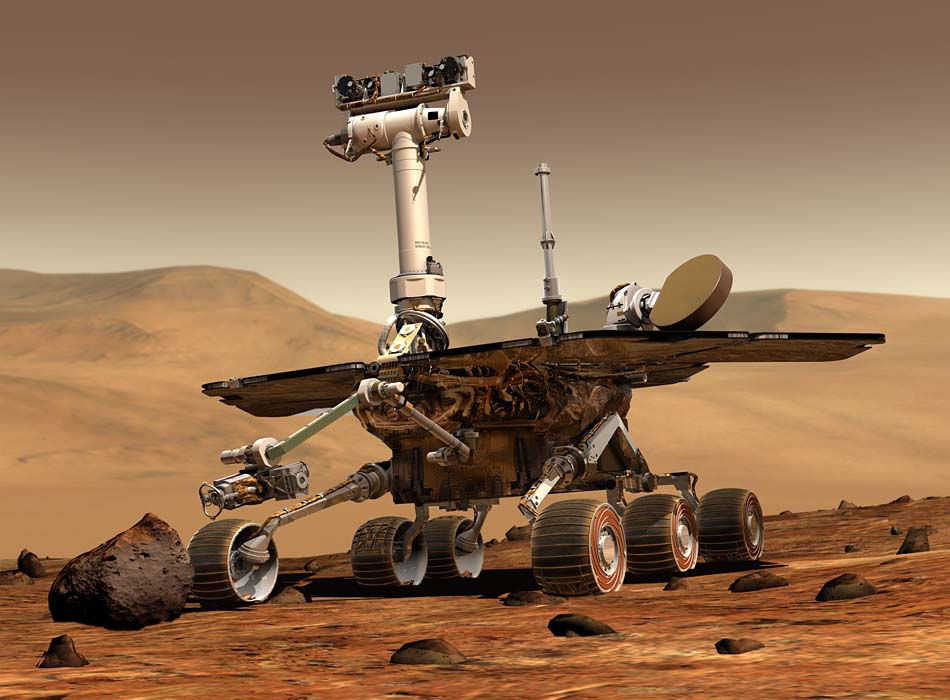 Na rozdíl od prvního vysazeného vozítka Sojourner byly rovery programu MER hmotnější, větší, konstrukčně odlišné a sofistikovanější. Každý z obou roverů má hmotnost 185 kg a po rozložení do pracovní konfigurace jsou jeho rozměry: délka 160 cm, šířka 230 cm a výška 150 cm. Na základě zkušeností s vozítkem Sojourner, bylo i v tomto případě každé vozítko vybaveno šestikolovým podvozkem. Každé z kol má samostatný náhon elektromotorem. Dvojice předních a zadních kol jsou řiditelné pomocí servomotorů. Natočení kol dovoluje vozítku otočit se na místě. Podvozek umožňuje překonat stoupání do 45°, ale z bezpečnostních důvodů má sklon omezen na pouhých 30°. Po překročení této hodnoty vydá náklonoměr povel řídícímu počítači a ten vozítko zastaví.
Na rozdíl od prvního vysazeného vozítka Sojourner byly rovery programu MER hmotnější, větší, konstrukčně odlišné a sofistikovanější. Každý z obou roverů má hmotnost 185 kg a po rozložení do pracovní konfigurace jsou jeho rozměry: délka 160 cm, šířka 230 cm a výška 150 cm. Na základě zkušeností s vozítkem Sojourner, bylo i v tomto případě každé vozítko vybaveno šestikolovým podvozkem. Každé z kol má samostatný náhon elektromotorem. Dvojice předních a zadních kol jsou řiditelné pomocí servomotorů. Natočení kol dovoluje vozítku otočit se na místě. Podvozek umožňuje překonat stoupání do 45°, ale z bezpečnostních důvodů má sklon omezen na pouhých 30°. Po překročení této hodnoty vydá náklonoměr povel řídícímu počítači a ten vozítko zastaví.
Přestože se jedná o robotizovaná vozítka, je zapotřebí s nimi komunikovat z důvodů řízení i předávání telemetrických a získaných dat. Komunikace je zajištěna pomocí anténního systému umístěného v horní části vozítka. Přímo se Zemí může rover komunikovat pomocí pevné všesměrové antény nebo přes otočnou vysokoziskovou anténu. Pro pomalé datové přenosy je určena všesměrová anténa (rychlost komunikace je kolem 12 až 35 Kbitů/s). Častěji se ale využívá komunikace v pásmu UKV, která se uskutečňuje pomocí antény přes družice obíhající po orbitě Marsu. V tomto případě je komunikace vyšší rychlostí až 128 Kbit/s.
Na palubách obou vozítek byla nainstalována vědecká aparatura, určená zejména pro hledání důkazů o přítomnosti tekoucí vody na povrchu Marsu v minulých obdobích. Na obou roverech byl instalován sklopný otočný sloupek, který nese navigační a panoramatické kamery pro stereoskopické snímkování okolního terénu a miniaturní spektrometr pro tepelné emise. V přední spodní části vozítka se nachází mechanické výklopné rameno s několika stupni volnosti. Na něm je nainstalován obrušovací nástroj pro pořízení výbrusů horniny, mikroskopický zobrazovač, kterým je možné pořídit detailní snímky horniny a několik spektrometrů. V přední horní části roveru byla namontována i sada magnetů pro zachycení magnetických prachových částeček z atmosféry pro jejich pozdější studium některým z vědeckých přístrojů. V zadní části vozítka je ještě jeden studentský experiment. Jedná se o krátkou tyčku, vrhající stín na stupnici. Tedy jakási obdoba gnómonu, či slunečních hodin, ukazující azimut a délku stínu.
Mise MER měla několik úkolů. Jedním z hlavních byl geologický průzkum s cílem zjistit, zda na Marsu existují důkazy existence vody v minulosti. Vozítka proto přistála v oblastech, kde se předpokládala na povrchu Marsu v minulosti voda. Rovery zde hledaly kameny a půdu, která by v minulosti mohla být vystavena působení ať již tekoucí, či stojaté vody. Spirit se pohyboval v oblasti impaktního kráteru Gusev, na jehož dně kdysi mohlo existovat jezero. Naopak Opportunity byl vysazen na planinu Meridiani, která se nachází téměř na opačné straně Marsu. I zde se předpokládala podle složení horniny (hematitu) v minulosti voda. Obě vozítka však prováděla i terénní průzkum planety. Během své mise pořídila a odeslala tisíce snímků nevídaného rozsahu a kvality, včetně panoramatických 360 stupňových snímků krajiny Marsu. Provedla různá vědecká měření a rozbory. Nafotila i meteorologické jevy jako jsou atmosférické víry, zákaly apod. Podařilo se nasnímat i částečná zatmění Slunce způsobená přechodem měsíců Marsu přes sluneční disk, čímž bylo možné zpřesnit trajektorie obou měsíčků a celou řadu dalších zajímavostí. Jedno z vozítek např. zkoumalo i fragmenty svého dopadlého tepelného štítu.
Je pravda, že ne všechno probíhalo zcela hladce. U obou roverů časem došlo k poklesu kapacity el. energie v důsledku zanesení slunečních panelů prachem (a někdy zase ke zvýšení kapacity po odfouknutí prachu větrem). Oba rovery se občas zabořily a byl problém je vyprostit. Někdy se vyskytly problémy i se spojením (např. velmi omezené radiové spojení, poruchy na družicové retranslační stanici apod.). Objevily se anomálie v činnosti počítače, dokonce reset, který dočasně přepnul rover do bezpečnostního módu. Objevily se i potíže mechanického charakteru. Jedno z řídících kol na Opportunity se zablokovalo v poloze 8° od přímého směru, mechanické rameno mělo a má problém s pohybem. V současnosti již funguje pouze MER B Opportunity. Druhé z vozítek, Spirit, již bylo nuceno svoji činnost ukončit.
Je ale nutné si uvědomit třeba to, že původní plánovaná mise měla trvat jen asi tři měsíce. U Opportunity však trvá již 10 let, i když nyní v omezeném rozsahu. Byl nejen splněn původní program mise, ale mohlo se přejít i na program rozšířený. Vozítka byla původně mechanicky konstruována na ujetí pouhého 1 km po povrchu Marsu. Opportunity však již urazila více jak 35 km. To nikdo nečekal a svědčí to o skvělé práci konstruktérů. Dnes se již více než rok pohybuje po povrchu Marsu zatím poslední konstrukční skvost, vozítko Curiosity. Je mnohem větší, těžší a sofistikovanější než jeho předchůdci. Má mnohem rozsáhlejší vědecký program a výbavu. I na něm už se vyskytlo několik problémů. Nezbývá než si přát, aby nám bylo schopno předat co nejvíce informací o Marsu a mělo při svém výzkumu co nejméně problémů.

{kind=link}
{kind=link}