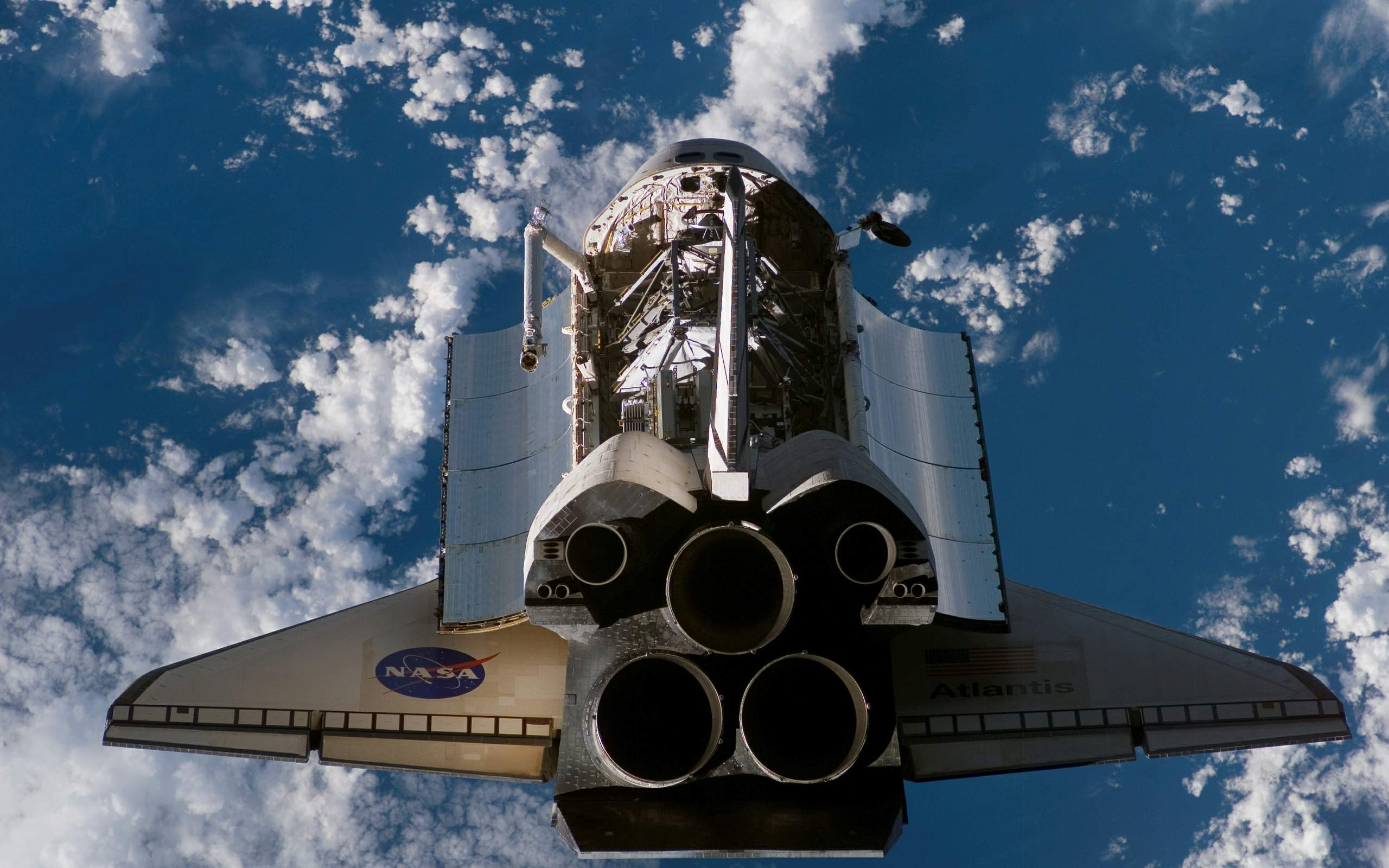
 Asi se nejprve dotyčného zeptáte, jestli má na mysli kompletní sestavu nebo jen samotný orbitální stupeň. Pokud odpoví, že jej zajímá počet motorů celé sestavy, možná vám na mysli vytane startující raketoplán. V tu chvíli u něj byly vždy nejvýraznějším jevem dlouhé plamenné chvosty, které šlehaly ze dvou pomocných startovacích raket (Solid Rocket Booster – SRB). Projevy trojice hlavních motorů (Space Shuttle Main Engine – SSME) orbitálního stupně byly sice také patrné, ale podstatně méně výrazné. Takže dva pomocné raketové stupně a tři hlavní motory dají dohromady číslovku pět. Myslíte si, že je to správná odpověď? Pokud ano, mýlíte se. Ve skutečnosti sestava raketoplánu obsahovala několik desítek motorů! Pojďme se na ně podívat blíže.
Asi se nejprve dotyčného zeptáte, jestli má na mysli kompletní sestavu nebo jen samotný orbitální stupeň. Pokud odpoví, že jej zajímá počet motorů celé sestavy, možná vám na mysli vytane startující raketoplán. V tu chvíli u něj byly vždy nejvýraznějším jevem dlouhé plamenné chvosty, které šlehaly ze dvou pomocných startovacích raket (Solid Rocket Booster – SRB). Projevy trojice hlavních motorů (Space Shuttle Main Engine – SSME) orbitálního stupně byly sice také patrné, ale podstatně méně výrazné. Takže dva pomocné raketové stupně a tři hlavní motory dají dohromady číslovku pět. Myslíte si, že je to správná odpověď? Pokud ano, mýlíte se. Ve skutečnosti sestava raketoplánu obsahovala několik desítek motorů! Pojďme se na ně podívat blíže.
Jak zřejmě víte, kompletní raketoplán se skládal ze tří základních částí. Byly jimi již zmíněné pomocné startovací rakety, vnější nádrž (External Tank – ET) a samotný orbiter. Probereme tedy motory podle těchto hlavních komponent. Největší z nich je vnější nádrž, se kterou budeme hotovi velice rychle. Ta totiž žádné motory neměla, mimo jiné proto, že po každém startu zanikala v atmosféře, a tak by byly motory zničeny spolu s ní.
Můžeme tedy přejít k další části a tou je dvojice pomocných startovacích raket. O těch zde najdete samostatný článek, proto nebudeme zabíhat do detailů. Samozřejmě většinu této komponenty zabíral samotný raketový motor na tuhá paliva, který se angličtině označoval zkratkou SRM (Solid Rocket Motor), případně se před ní přidávalo ještě písmenko R jako reusable (znovupoužitelný). Protože rakety se používaly ve dvojici, začínáme naše počty na dvou motorech. Tím však naše prohlídka startovacích raket ještě nekončí. Na zažehnutí SRM se používala dvojice menších raketových motorů – menší o délce 18 cm a druhý, který zapaloval samotný SRM, měl 91 cm. Dále se na obvodu každé rakety nacházelo celkem osm dalších motorků na tuhé palivo (po čtveřicích v horní a dolní části SRB) o délce 79 cm a tahu přibližně 89 kN. Ty zajišťovaly odlet SRB do bezpečné vzdálenosti po jejich odhození. Takže po chvilce počítaní zjistíme, že každá startovací raketa obsahovala nikoli jeden, ale hned 11 motorů, což znamená celkem 22 motorů ve startovací sestavě.
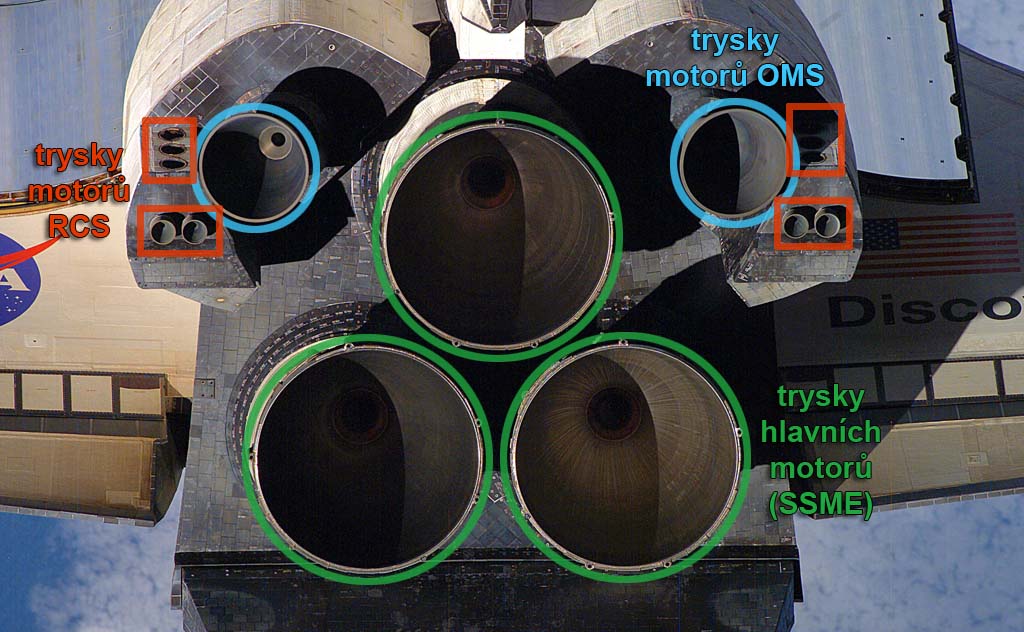
A co samotný orbitální letoun? Už padla zmínka o tom, že měl na zádi tři hlavní motory (SSME). Ty měly v nejnovější variantě průměr 2,4 metru, délku 4,3 metru, hmotnost 3,5 tuny a ve vakuu byly schopné dosáhnout tahu až 2 279 kN. Jejich úkolem bylo, ve spolupráci s pomocnými startovacími raketami, vynést družicový stupeň raketoplánu na oběžnou dráhu Země. Jako pohonné hmoty používaly tekutý vodík a kyslík, který byl do nich přiváděn z vnější nádrže. Její obsah, čítající 102,6 tuny vodíku a 616,5 tuny kyslíku, se sice zdá obrovský, ale musíme vzít v potaz, že každý motor spotřeboval za jedinou sekundu 467 kg pohonných hmot. Při této rychlosti trojici motorů palivo vydrželo přibližně na 8,5 minuty letu, poté došlo k jejich vypnutí, nádrž se odpojila a hlavní motory už nebylo možné během letu použít.
Motory musely během své činnosti vydržet mimořádně velké rozpětí teplot. Přiváděný kapalný kyslík měl teplotu -183 °C, tekutý vodík dokonce -253 °C a ve spalovací komoře během hoření vznikaly teploty vyšší než 3 300 °C. Při takové teplotě je dokonce i železo v plynném skupenství a není proto divu, že motor musel být intenzivně chlazen, aby nedošlo k jeho poškození. Používala se k tomu takzvaná regenerativní metoda, kdy část kapalného vodíku procházela stěnami, ochlazovala je a díky tomu teplota povrchu spalovací komory nepřekročila 567 °C. Životnost motoru byla stanovena na 55 startů. Výrobcem hlavních motorů byla a dosud je firma Pratt & Whitney Rocketdyne, dříve jen Rocketdyne.
Takže opět budeme chvilku počítat – k 22 motorům u pomocných startovacích raket přičteme tři hlavní z orbiteru a máme celkový výsledek? Kdepak, stále ještě nám řada motorů chybí.
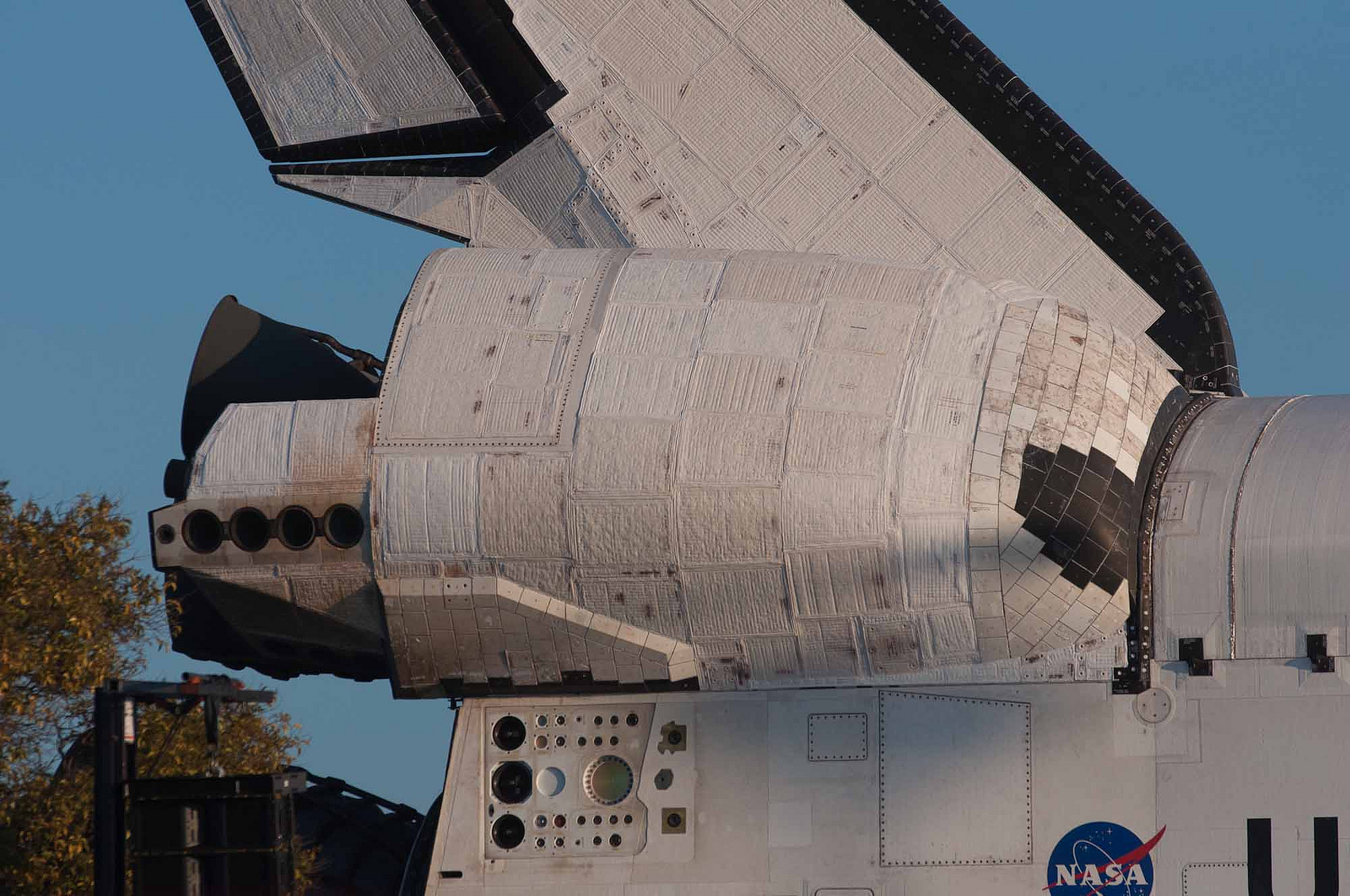
Další na řadě budou motory, nacházející se v kapkovitých modulech (gondolách), ležících po obou stranách svislé ocasní plochy. Tyto moduly měly délku 6,6 metru a jejich šířka v přední části dosahovala 2,6 metru, postupně se ale zvětšovala až na 3,5 metru. Připevnění k trupu zajišťovalo jedenáct šroubů, díky nimž se daly v případě potřeby odmontovat. Při pohledu zezadu byla na konci každého modulu vidět tryska o zhruba polovičním průměru, než měla trojice trysek SSME. Byly umístěny jen o trochu výše než tryska prostředního, nejvýše položeného hlavního motoru. Patřily manévrovacím motorům, které vyráběla společnost Aerojet. Označovaly se buď jako „motory OMS“ (Orbital Maneuvering System – orbitální manévrovací systém) nebo zkráceně „OME“ (Orbital Maneuvering Engines – orbitální manévrovací motory). Parametry obou OME byly identické – délka 196 cm, největší průměr 117 cm, hmotnost 118 kg, tah 26,7 kN a spotřeba 8,7 kg/s. Jako palivo se používal monometylhydrazin a oxid dusičitý. Jakmile se tyto dvě látky dostanou spolu do kontaktu, dojde k jejich vznícení, a to i ve vzduchoprázdnu, takže motory nepotřebovaly žádný zápalný systém. Zajímavá byla i doprava těchto látek do spalovací komory. Nevhánělo je žádné čerpadlo, ale pouze tlak pracovního plynu, jímž bylo stlačené hélium. Motory byly konstruovány tak, aby vydržely 1 000 zážehů, případně až 15 hodin provozu. Údaje o tom, jak velké zásoby paliva měly motory k dispozici, se značně rozcházejí. Pokud budeme věřit údajům ze serveru Capcom Espace, tak do nádrží pro OME se v každém modulu vešlo 1 802 kg monometylhydrazinu a 2 973 kg oxidu dusičitého. Kvůli rozšíření manévrovacích schopností se nějakou dobu uvažovalo o tom, že by se další nádrže přidaly do nákladového prostoru, ale tento záměr nakonec nebyl realizován.
 K čemu se tyto motory používaly? Měly celou škálu úkolů a našly uplatnění v téměř každé fázi letu – během startu, při pohybu na oběžné dráze i v počátcích přistávacího manévru. Přesné využití se lišilo podle cíle kosmické mise. Například v některých případech, zejména pokud měl raketoplán vynést na oběžnou dráhu těžký náklad, se OME spouštěly krátce po odhození pomocných startovacích raket, přibližně dvě minuty po startu. Pracovaly tak společně s hlavními motory a usnadnily stoupání stroje. Častěji se však zapínaly až poté, co hlavní motory ukončily svou činnost, a došlo k odpojení vnější nádrže. V tu chvíli se raketoplán nalézal na základní suborbitální dráze. Pokud by nedostal žádný další impuls, nedokončil by ani jeden oběh Země, a opět by sestoupil do hustějších vrstev zemské atmosféry. Byla to svým způsobem pojistka, aby se mohl rychle vrátit na zem, kdyby došlo k nějakému většímu selhání, které by znemožnilo jeho práci na orbitě. Pokud taková situace nenastala, přibližně 10 až 12 minut po startu se zažehly oba OME a uskutečnily manévr, označovaný jako OMS-1. Díky němu se raketoplán dostal na přechodovou dráhu s odzemím ve výšce kolem 250 km, ale s přízemím níže než 100 km. Zhruba za 45 minut se pak prováděl manévr OMS-2, který navedl raketoplán na konečnou dráhu. Ta byla nejčastěji ve výšce 250 až 350 km nad zemským povrchem, ale mohla ležet i podstatně výše. Například při misi STS-31, během které byl vypuštěn Hubbleův kosmický dalekohled, byl raketoplán v odzemí vzdálen od Země až 615 km. Při některých letech se manévr OMS-1 vynechával, prováděl se jen OMS-2.
K čemu se tyto motory používaly? Měly celou škálu úkolů a našly uplatnění v téměř každé fázi letu – během startu, při pohybu na oběžné dráze i v počátcích přistávacího manévru. Přesné využití se lišilo podle cíle kosmické mise. Například v některých případech, zejména pokud měl raketoplán vynést na oběžnou dráhu těžký náklad, se OME spouštěly krátce po odhození pomocných startovacích raket, přibližně dvě minuty po startu. Pracovaly tak společně s hlavními motory a usnadnily stoupání stroje. Častěji se však zapínaly až poté, co hlavní motory ukončily svou činnost, a došlo k odpojení vnější nádrže. V tu chvíli se raketoplán nalézal na základní suborbitální dráze. Pokud by nedostal žádný další impuls, nedokončil by ani jeden oběh Země, a opět by sestoupil do hustějších vrstev zemské atmosféry. Byla to svým způsobem pojistka, aby se mohl rychle vrátit na zem, kdyby došlo k nějakému většímu selhání, které by znemožnilo jeho práci na orbitě. Pokud taková situace nenastala, přibližně 10 až 12 minut po startu se zažehly oba OME a uskutečnily manévr, označovaný jako OMS-1. Díky němu se raketoplán dostal na přechodovou dráhu s odzemím ve výšce kolem 250 km, ale s přízemím níže než 100 km. Zhruba za 45 minut se pak prováděl manévr OMS-2, který navedl raketoplán na konečnou dráhu. Ta byla nejčastěji ve výšce 250 až 350 km nad zemským povrchem, ale mohla ležet i podstatně výše. Například při misi STS-31, během které byl vypuštěn Hubbleův kosmický dalekohled, byl raketoplán v odzemí vzdálen od Země až 615 km. Při některých letech se manévr OMS-1 vynechával, prováděl se jen OMS-2.
Jednou byly motory OMS použity během startovacího manévru poněkud odlišným způsobem. Bylo to při misi STS-51-F, kdy se objevily vážné problémy s hlavními motory a bylo nutné provést nouzový manévr ATO (Abort to Orbit). Při tomto manévru také došlo k zapnutí manévrovacích motorů, ale hlavním cílem bylo trochu „ulehčit“ raketoplánu. Během jejich provozu se totiž spotřebovaly téměř dvě tuny paliva a díky tomu mohl raketoplán dosáhnout vyšší oběžné dráhy.
Druhým úkolem pro manévrovací motory bylo uskutečňování různých korekcí během letu po oběžné dráze. Nyní již nebylo nutné zapínat oba motory současně, parametry dráhy se mohly měnit i zážehem jednoho manévrovacího motoru. Díky uložení OME v kardanových závěsech se dala jejich spalovací komora a tryska natočit tak, aby osa tahu procházela těžištěm raketoplánu. Mohly se tak uskutečnit experimenty, které sledovaly, jak bude na takové zážehy raketoplán reagovat.
A konečně do třetice se OME používaly i při ukončování letu. Nejprve se raketoplán otočil o 180 stupňů, aby letěl zádí napřed. V dalším kroku astronauté zapnuli manévrovací motory obvykle na dvě až tři minuty, aby zbrzdili kosmickou loď průměrně asi o 90 metrů za sekundu. To již stačilo k tomu, aby raketoplán začal pomalu klesat směrem k zemskému povrchu. Poté se opět obrátil tak, aby jeho příď byla ve směru letu a do dalších fází přistávacího manévru již OME nezasahovaly.
Připočítáním dvou motorů OMS se dobereme k tomu, že orbitální letoun měl pět a kompletní raketoplán pak 27 raketových motorů. Stále ještě jsme se ale nedostali k jedné kategorii motorů, které jsou sice slabší, než předchozí, ale zato jich bylo na orbiteru nejvíce. Které to jsou?
Jednalo se o skupinu motorů, sloužících hlavně k orientaci a stabilizaci kosmického letounu. V angličtině se označovala zkratkou RCS (Reaction Control System – reaktivní ovládací systém) a motory byly rozmístěny na třech místech raketoplánu. Většina z nich se dala najít v zadní části orbiteru, ve stejných gondolách jako motory OMS, a proto se tato část raketoplánu měla správně nazývat moduly OMS/RCS. Zbylé motory pak byly umístěny v přední části raketoplánu, před kabinou pro posádku. Kvůli odlišení od motorů na zádi se pro ně používala anglická zkratka FRCS, kde písmeno „F“ znamenalo „front“, tj. česky „přední“. Motory na přídi raketoplánu byly rozděleny do tří skupin, aby co nejlépe pokryly požadavky na jemné manévrování ve všech směrech. Před kabinou se nacházely trysky šesti motorů a na obou stranách přídě jich bylo umístěno dalších pět. Celkově tak blok FRCS obsahoval šestnáct motorů. V kapkovitých modulech na zádi pak bylo vždy po čtrnácti motorech RCS, jež měly trysky rozloženy do různých směrů. V zadní části bylo tedy 28 motorů RCS a spolu s blokem FRCS se dostáváme k celkovému počtu 44.
 Pokud se chceme podívat na technické parametry motorů RCS, narazíme na jednu zvláštnost. Nebyly totiž všechny stejné, ale dělily se na dva typy. Větší z nich měly označení R-40A, délku 47 cm, největší průměr 27 cm, hmotnost 9,5 kg, disponovaly tahem 3,87 kN a jejich spotřeba byla 1,4 kg/s. Motorů tohoto typu bylo na orbiteru rozmístěno celkem 38, z toho čtrnáct na přídi, zbytek v modulech OMS/RCS. Dohromady tvořily primární (hlavní) okruh RCS, označovaný někdy zkratkou PRCS, kde úvodní „P“ znamenalo „primary“.
Pokud se chceme podívat na technické parametry motorů RCS, narazíme na jednu zvláštnost. Nebyly totiž všechny stejné, ale dělily se na dva typy. Větší z nich měly označení R-40A, délku 47 cm, největší průměr 27 cm, hmotnost 9,5 kg, disponovaly tahem 3,87 kN a jejich spotřeba byla 1,4 kg/s. Motorů tohoto typu bylo na orbiteru rozmístěno celkem 38, z toho čtrnáct na přídi, zbytek v modulech OMS/RCS. Dohromady tvořily primární (hlavní) okruh RCS, označovaný někdy zkratkou PRCS, kde úvodní „P“ znamenalo „primary“.
Menší motory se jmenovaly R-1E a měly tyto parametry: délku 28 cm, maximální průměr 15 cm, hmotnost 3,7 kg, tah 111 N a spotřebu 0,04 kg/s. Říkalo se jim také vernierové podle francouzského matematika Pierra Verniera, který vynalezl několik pomůcek pro přesná měření délek a úhlů. Právě pomocí těchto malých motorů raketoplán jemně „dolaďoval“ svoji polohu během některých operací na oběžné dráze. Nacházely se vždy po dvou, a to jak v obou modulech OMS/RCS, tak v bloku FRCS. Celkově jich tedy na orbiteru bylo šest.
Stejně jako OME, i oba typy RCS motorů používaly ke své činnosti samozápalnou směs z monometylhydrazinu a oxidu dusičitého. Pokud chceme zjistit, jak velké zásoby paliva měly tyto motory, zjistíme, že uváděné údaje se liší zdroj od zdroje. Podíváme se tedy opět na server Capcom Espace, který uvádí, že v modulech OMS/RCS bylo místo pro 369 kg monometylhydrazinu a 585 kg oxidu dusičitého. Jak R-40A, tak i R-1E vyráběla společnost Marquardt.
Motory RCS plnily během kosmických misí několik funkcí. Poprvé se používaly přibližně devět minut po startu, ve chvíli, kdy již byla ukončena činnost hlavních motorů a krátce nato, co se orbiter oddělil od vnější nádrže. V tu chvíli autopilot zažehl zhruba na pět sekund čtyři motory RCS v přední části a celkem šest v modulech na zádi, což způsobilo, že orbiter se začal mírně vzdalovat od nádrže. Zdánlivě tato akce vypadala, že raketoplán odhazuje nádrž směrem k Zemi.
Další práci měly motory RCS poté, co se raketoplán dostal na oběžnou dráhu. Jedním z jejich úkolů bylo udržování stroje na požadované dráze, jeho přesná orientace a případně provádění drobných korekcí podle požadavků posádky či řídícího střediska. Nepostradatelné byly zejména v případě, kdy se raketoplán měl přiblížit k nějakému jinému objektu. Při dřívějších misích se jednalo o zachytávání a opravy vybraných družic či Hubbleova kosmického dalekohledu, později se orbiter spojoval s kosmickou stanicí Mir nebo Mezinárodní vesmírnou stanicí (ISS). V takových případech se muselo manévrovat extrémně opatrně, protože případný větší náraz mohl mít fatální následky. Právě proto, aby se dalo manévrovat velmi přesně a jemně, bylo motorů RCS tolik a jejich tah tak slabý.
Důležitý úkol měly motory RCS v případě, kdyby se z nějakého důvodu nedaly použít OME na začátku přistávacího manévru. Musely by je nahradit, samy se postarat o snížení rychlosti raketoplánu a tím jej navést na sestupnou dráhu. Sloužily tedy jako záloha pro případ nečekaných situací. Kdyby selhaly oba systémy (OMS i RCS), raketoplán by nemohl sestoupit z oběžné dráhy a posádka by byla odsouzena ke smrti.
Na rozdíl od ostatních se motory RCS používaly i poté, co raketoplán opustil oběžnou dráhu a začal klesat k zemi. Zpočátku byla jeho rychlost velmi vysoká a okolní atmosféra tak řídká, že se k ovládání stroje nedaly použít žádné aerodynamické prvky. Například ve výšce kolem 120 km nad zemí, což se považovalo za vstup do atmosféry, urazil raketoplán každou sekundu vzdálenost osm kilometrů. Jediný účinný způsob, jak v tu chvíli korigovat dráhu, bylo používání raketových motorů RCS. Jak postupně kosmický letoun klesal do stále hustějších vrstev atmosféry, narůstala účinnost jeho aerodynamických prvků a začaly být používány v kombinaci s motory RCS. Po dosažení výšky asi 80 km již zvládly plně ovládat let a motory RCS mohly být vypnuty.
Nyní se znovu vrátíme k počítání motorů a raději si nejprve zopakujeme předchozí výsledky. Vnější nádrž žádné motory neměla, pomocné startovací rakety jich měly jedenáct (jeden velký motor na pevné palivo, dva malé, které sloužily k jeho zažehnutí a osm dalších, pomocí kterých se odpoutávaly od zbytku sestavy). Protože pomocné rakety byly dvě, celkem jsme na 22 motorech. Orbiter obsahoval tři hlavní motory (SSME), dva motory OMS a 44 motorů RCS (38x R-40A a 6x R-1E), což je v součtu 49 motorů. Kompletní sestava raketoplánu tedy při startu obsahovala 22+49, což je 71 raketových motorů! Teď ruku na srdce – kdo z vás toto číslo věděl už před přečtením článku?
Ještě však nesmíme zapomenout na jednu věc – celou dobu jsme se zabývali pouze raketovými motory. V raketoplánu jsou ale i jiné druhy motorů. Spočítat i ty by však zřejmě byl nadlidský úkol, proto se jen krátce zmíníme o třech, jež bezprostředně souvisely s některými raketovými motory a ty by bez nich nemohly řádně fungovat.
 U větších motorů bylo nutné ovládat směr vektoru tahu, aby raketoplán letěl přesně tam, kam bylo zapotřebí. Na pomocných startovacích raketách se o to starala hydraulická jednotka (agregát), označovaná v angličtině zkratkou HPU (Hydraulic Power Unit). Její hlavní částí byla plynová turbína, poháněná hydrazinem, jíž se říkalo APU (Auxiliary Power Unit – pomocná energetická jednotka). Turbína pomocí převodovky poháněla hydraulické čerpadlo, které tlakem hydraulické kapaliny mohlo pohybovat soustavou válců a táhel. Ta pak ovládala natáčení expanzních trysek SRM, čímž se dal korigovat směr letu. Hydraulické jednotky byly na každé raketě dvě, a to zcela nezávislé, aby v případě selhání jedné z nich ji mohla druhá plnohodnotně zastoupit. Systém byl navržen tak, aby vydržel dvacet startů.
U větších motorů bylo nutné ovládat směr vektoru tahu, aby raketoplán letěl přesně tam, kam bylo zapotřebí. Na pomocných startovacích raketách se o to starala hydraulická jednotka (agregát), označovaná v angličtině zkratkou HPU (Hydraulic Power Unit). Její hlavní částí byla plynová turbína, poháněná hydrazinem, jíž se říkalo APU (Auxiliary Power Unit – pomocná energetická jednotka). Turbína pomocí převodovky poháněla hydraulické čerpadlo, které tlakem hydraulické kapaliny mohlo pohybovat soustavou válců a táhel. Ta pak ovládala natáčení expanzních trysek SRM, čímž se dal korigovat směr letu. Hydraulické jednotky byly na každé raketě dvě, a to zcela nezávislé, aby v případě selhání jedné z nich ji mohla druhá plnohodnotně zastoupit. Systém byl navržen tak, aby vydržel dvacet startů.
Podobné zařízení bylo i v samotném orbitálním stupni raketoplánu, kde se však trochu zvláštně pro celou hydraulickou jednotku nepoužívala zkratka HPU, ale APU (Auxiliary Power Unit). Také zde pracovala plynová turbína, poháněná hydrazinem, který se chemicky převáděl z kapalného do plynného skupenství, a podobným způsobem ovládala hlavní motory raketoplánu. Rozdíl byl v tom, že u nich byly trysky pevně spojeny se spalovacími komorami, a proto hydraulická jednotka pohybovala celým kompletem. Mohla vychylovat spalovací komory s tryskami v rozsahu 10,5 stupně ve svislém a 8,5 stupně ve vodorovném směru. Každý hlavní motor měl vlastní jednotku, takže na orbiteru byly celkem tři. Na rozdíl od HPU na startovacích raketách, měly jejich „kolegyně“ na orbiteru více funkcí. Jednou z nich bylo například ovládání regulačních ventilů hlavních motorů. Speciální úkol měly během operace, kdy se oddělovala vnější nádrž. Spojení se přerušilo pyrotechnicky a hydraulické jednotky měly za úkol zasunout dovnitř orbiteru spojovací zařízení, ke kterým byly před tím připojeny hadice s palivem a okysličovadlem pro hlavní motory.
APU na orbiteru se používaly nejen při startu, ale i během návratu na zem. V tu chvíli již logicky nebyly v provozu hlavní motory, takže nemělo smysl ovládat jejich náklon. Místo toho APU měly na starosti aerodynamické řídící plochy, pomocí kterých usměrňovaly a zpomalovaly let raketoplánu. Další úkoly se týkaly podvozku – APU zajišťovaly jeho vysunutí, dodávaly energii posilovači řízení předního kola, podvozkovým brzdám a protiskluzovému zařízení. Ačkoli se během přistávacího manévru spouštěly všechny tři APU, v případě nouze by raketoplánu k přistání stačila jediná funkční jednotka.
A do třetice, své systémy k řízení směru tahu měly i motory OMS. V jejich případě se nejednalo o hydraulické ovládání, protože by bylo zbytečně komplikované a robustní. Motory OMS měly výrazně menší tah než SSME a SRM, a proto k jejich ovládání stačily elektrické servomotory. Díky nim se daly oba motory OMS natočit do sedmi různých poloh.
Jak je vidět, i dalších motorů bychom našli na raketoplánu přehršel. Počítali bychom je asi velmi dlouho, bude tedy lepší s tím již přestat a článek ukončit. Dopracovali jsme se k tomu, že v kompletní sestavě raketoplánu se nacházelo 71 raketových motorů a celá řada motorů jiného druhu. Tím se znovu potvrdilo, že se jednalo o úžasný a nesmírně komplikovaný stroj, který právem můžeme považovat za jeden z dosavadních vrcholů (nejen) kosmické techniky.
Další zajímavosti o programu Space Shuttle
Vybrané zdroje:
- Petr Kubala: Raketoplány – Příběh kosmických korábů
- Tomáš Přibyl: Den, kdy se nevrátila Columbia
- Orbital Maneuvering System/Reaction Control System Pods
- How Space Shuttles Work
- Minikurz kosmonautiky
- Les moteurs de manoeuvre OMS-RCS
- Goddard Space Flight Center: Ask an Astrophysicist
- spaceflight.nasa.gov – Hydraulic Power Units
- spaceflight.nasa.gov – Hydraulic System
- spaceflight.nasa.gov – External Tank Separation System
{kind=link}
{kind=link}
{kind=link}